|
|
请使用QQ关联注册PLM之家,学习更多关于内容,更多精彩原创视频供你学习!
您需要 登录 才可以下载或查看,没有账号?注册

x
8 X9 o5 `+ K$ z0 l
$ d; q# \+ ?; i: H获得 CATIPrtPart. i7 K* j, K4 v+ S9 W
8 P* [) _; _& t9 m" `
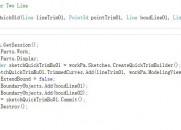
参考代码如下:; D5 D ^( Z, B. ?$ E
CATIPrTContainer_var spPrtContainer = spContainer;- `) w! [, a, x) t- U
CATIPrtPart_var spPrtPart = spPrtContainer ->GetPart();( ~* q+ c: M3 n$ W8 u" x( g
( C# h' y8 C g7 t0 z- ]6 b4 M
获得零件下所有节点
9 U! t' |" s3 m0 w. F- \2 T方法一:利用 CATIDescendants 接口# {1 X- Z4 O( r2 p' g
CATIDescendants_var spDescendantsOnPart = spPrtPart;' q" O/ _1 Z; b+ V- i
CATListValCATISpecObject_var spSpecObjects;. t+ q) I' _5 K& ~, `& z7 W' @
piDescendantsOnPart->GetAllChildren("CATISpecObject", spSpecObjects);6 ?4 P' W5 T+ L2 _5 b
$ b. ^7 @2 c- |; K9 ]5 H3 z; W方法二:利用CATContainer 中的ListMembersHere 方法' \$ [9 h5 {5 N/ C
SEQUENCE(CATBaseUnknown_ptr) ListObj;
: K2 R2 }5 A# } C2 @. Xlong NbObj = piRootContainer->ListMembersHere("CATISpecObject",ListObj);
3 c( W% [& w: L9 P% s/ H* N/ q4 ^/ Kfor(int j=0;j<NbObj;j++)//注意从0 开始
2 F7 ~+ L$ y3 L{}
0 b4 Y( _9 Q2 ~8 e注意:"CATISpecObject"表示将所有的节点列出,如果想要只列出某种元素,可以将该
6 t( l; P% t* L! Z m参数设置为相应的接口,例如"CATPoint"表示所有的点。
- T# D. R( |0 _! H) V
8 q9 f; @7 E8 h$ }* D" C: L1 U9 u' L6 u2 L
获得参考平面- P( j3 `9 f; ]' q l& T
参考平面包括 XY 平面、YZ 平面、ZX 平面,参考代码如下:+ J% E! L( m, i* O, N' j
CATListValCATISpecObject_var spReferencePlanes;$ x- I7 A# I. T5 h! w: M- E4 U* C
spReferencePlanes = spPrtPart->GetReferencePlanes();5 j# _1 k! c Q
注意:spReferencePlanes 为包含三个元素的数组,数组元素依次为xy 平面, yz 平面和zx 平
' Y- W! Z8 \) G6 L面。2 I2 n$ |: I. s; _
如果要使用 yz 平面,则参考代码如下:6 @/ |( [/ a4 z' n. o+ C
CATISpecObject_var spyzPlane = spReferencePlanes[2];7 i5 t2 k! D* A
; B+ T7 o5 L; u# f4 b# V' l
; R, i1 M: G. l! o+ _获得轴系
3 V, W8 q& Y6 M6 r9 P; K9 C参考代码如下:3 M9 H' a) J# M- X. ^4 q4 h
CATIMf3DAxisSystemManager_var spAxisSystem = NULL_var;' j5 f9 w* v6 E" l1 R
spPrtPart->QueryInterface(IID_ CATIMf3DAxisSystemManager,(void**)& spAxisSystem);
3 c) B1 P; [1 c5 }2 ?* u5 m; l+ e; O" x. b) c/ D# G3 N
//得到的所有轴系, m( l$ v( a, R5 o) O2 E
CATLISTV(CATIMf3DAxisSystem_var) oAxisSystemList;
$ j& F9 x7 Z, b' @! E: pspAxisSystem ->GetAxisSystems(oAxisSystemList);+ l+ ]9 ?; B; F8 n. g) K( \- X7 O
: a6 }$ s1 d8 ^8 b' x" r y1 h" P3 T/ `3 d: R" T+ F: h
0 P1 O t% e( f; J' k5 q0 q2 c/ }& g) z: D* C& w# A" H
' \7 t' T. {/ q0 O4 A# _% I" X2 @( Z" @& f% H k
|
|












 |小黑屋|PLM之家-专注工业软件生态建设,大模型CAD创新生态
|小黑屋|PLM之家-专注工业软件生态建设,大模型CAD创新生态







 发表于 2018-2-22 13:10:11
发表于 2018-2-22 13:10:11


